您好!欢迎光临
工博士商城
ABB机器人控制器专营店
产品:18
联系我们
网站首页
联系方式
供应产品
新闻中心
您当前的位置:
首页
»
新闻中心
» ABB机器人编程技巧之“ClearPath”用法讲解分享--ABB机器人配件
产品分类
全部分类
ABB机器人控制器
ABB机器人控制柜
ABB机器人配件控制器
ABB机器人应用设备及附件
工艺设备
导轨系统
视觉系统
工件变位机
伺服电机
机器人清洗、去毛刺系统
走线连接器
机器人接触板
ABB机器人培训
新闻中心
ABB机器人编程技巧之“ClearPath”用法讲解分享--ABB机器人配件
发布时间:2020-04-28 浏览次数:871
返回列表
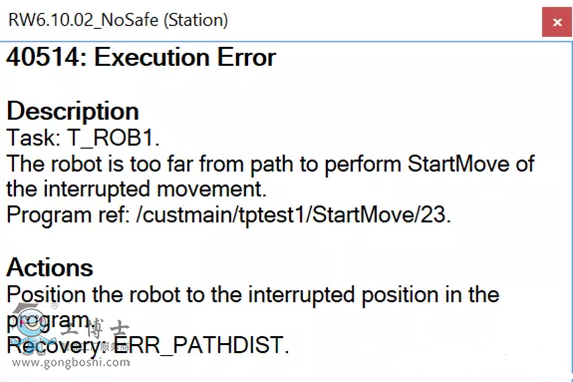
今天我们来讲一下Rapid指令“ClearPath”的用法和适用场景。当机器人遭遇到一些故障的时候,诸如特定的故障代码,特定的信号触发等;这时我们希望机器人停止并回到指定位置(Home,Service position)再进行下一步的处理。这时我们会想到中断指令,故障发生后进入中断,停止当前运动然后又用Move指令让它到指定位置,这是常规套路。咦?怎么报错了?
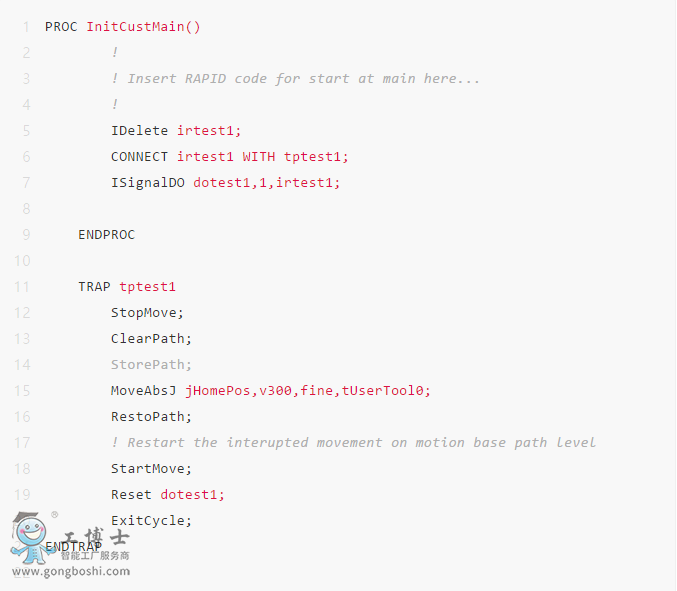
原因是在执行故障发生前的一条MoveL指令时,其实系统已经提前进行了路径规划,并且把已经规划好的路径存在Memory中,如果在没有完成当前路径的情况下再去触发下一个路径,那么机器人还没有办法做下一个路径规划。这时我们需要用“ClearPath”指令清除当前路径以让其生成下一个路径,请见以下例子:
了解更多:
ABB机器人配件
下一篇:
ABB为未来医院开发提供解决方案!--ABB机器人配件
上一篇:
ABB机器人自定义错误处理处理方法--ABB机器人配件
©上海众平科技有限公司 版权所有 技术支持:
工博士
访问量:57976
网站首页
管理入口
联系热线:15000955165 联系人:佘小姐 联系地址:上海市宝山区富联一路98弄6号
技术和报价服务:星期一至星期六8:00-22:00
ABB机器人控制器专营店
——在线咨询——


 联系我们
联系我们