

 联系我们
联系我们

**是MoveJ指令:关节运动指令
第二是MoveL指令:线性运动指令
第三MoveC指令:圆弧运动指令
第四MoveAbsj指令:**运动指令
ABB工业机器人基本运动指令格式分为 运动方式,目标位置,运行速度,转弯半径,工具中心点等5个部分。指令示例:
MoveL p10,v1000,z50,tool0;!机器人TCP到达距离目标点p10的50mm处绕过目标点
MoveL p20,v1000,fine,tool0;!机器人TCP到达目标点p20时速度降为零 。
机器人转弯半径示意如下图所示。
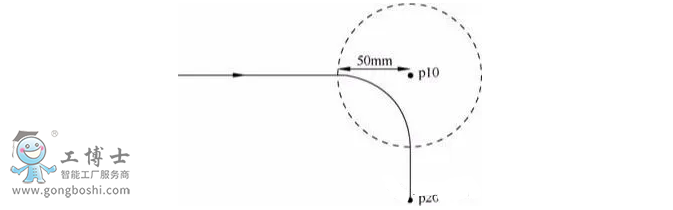
程序指令中 fine是指机器人TCP到达目标点时速度降为零,机器人动作有所停顿然后继续运动。zone指机器人TCP不达到目标点,而是在距离目标点所设置的数值长度处圆滑绕过目标点。一般情况下,一段路径的*后一个点,设置转弯区尺寸为参数fine。
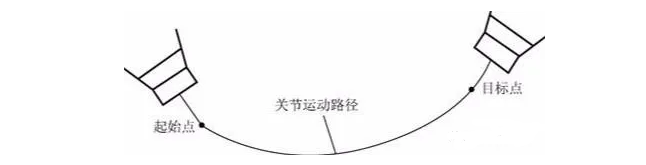
(1)、**种运动指令是:关节运动指令MoveJ
其运动特点是:运动轨迹精度不高、大范围运动。指令示例:MoveJ p30,v200,fine,tool1;机器人TCP以关节运动到达目标点p30,运行速度为200mm/s,转弯区半径是fine,使用的工具是tool1。运动轨迹如下图所示。
(2)、第二种运动指令是:直线运动指令MoveL
其运动特点是:起点到目标点间保持为直线运动、常用于焊接、涂胶作业。
指令示例:MoveL p20,v100,fine ,tool1;
执行上述指令,机器人运动轨迹如下图所示(图中从起始点到目标点p20点)。机器人TCP以直线运动到达目标点p20时速度降为零,使用的工具仍然是tool1。

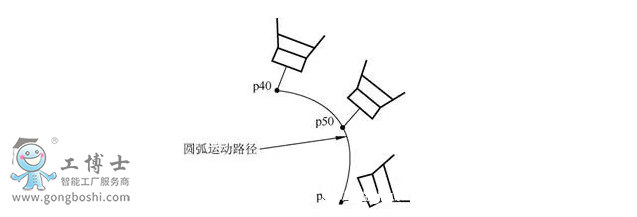
(3)、第三种运动指令是:圆弧运动指令MoveC
指令示例:MoveL p40,v200,z50,tool1;
MoveC p50,p60,v200,fine,tool1;
机器人TCP从前一位置以直线运动到达圆弧起始点,接着从起始点p40到终点p60做圆弧运动,运行速度为200mm/s,转弯区半径是fine,使用的工具是tool1。如下图所示。
4.**位置运动指令MoveAbsJ
其运动特点是:机器人运行至各关节轴零点位置。指令示例:MoveAbsJ p50,v1000,z50,tool1;
机器人将携带工具tool1沿着一个非线性路径到**轴位置p50,其中P50为关节目标点,各关节轴为零度。
了解更多:ABB机器人
